Image 1 of 4
Image 1 of 4
 Image 2 of 4
Image 2 of 4
 Image 3 of 4
Image 3 of 4
 Image 4 of 4
Image 4 of 4
Roboworks are proud to present the new Robofleet, a package comprising of either 3, 5, 10 or 15 Rosbots, perfectly suited for further research and development projects – particularly in the fields of swarm robotic control systems, autonomous driving systems and multi-agent robotic control systems.
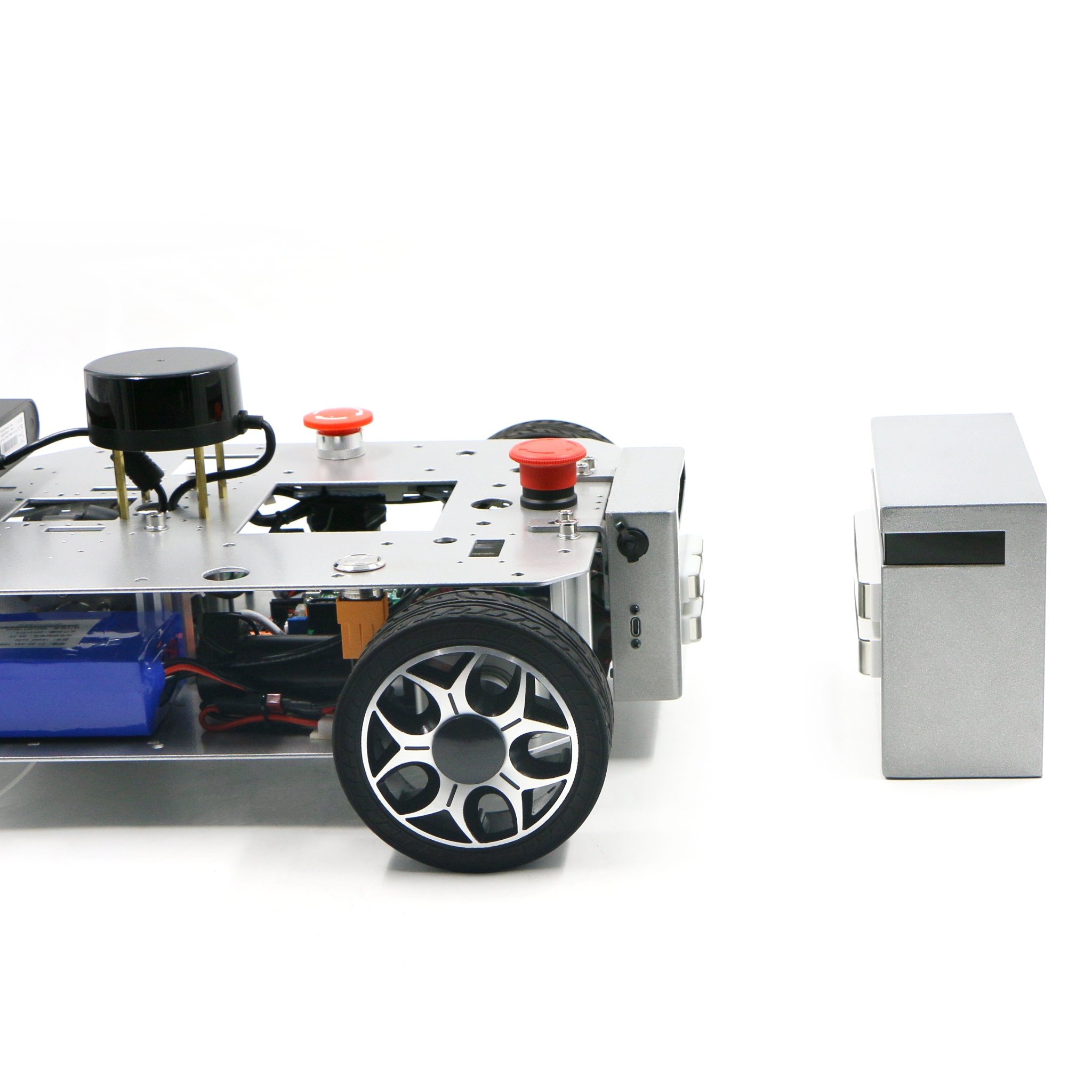
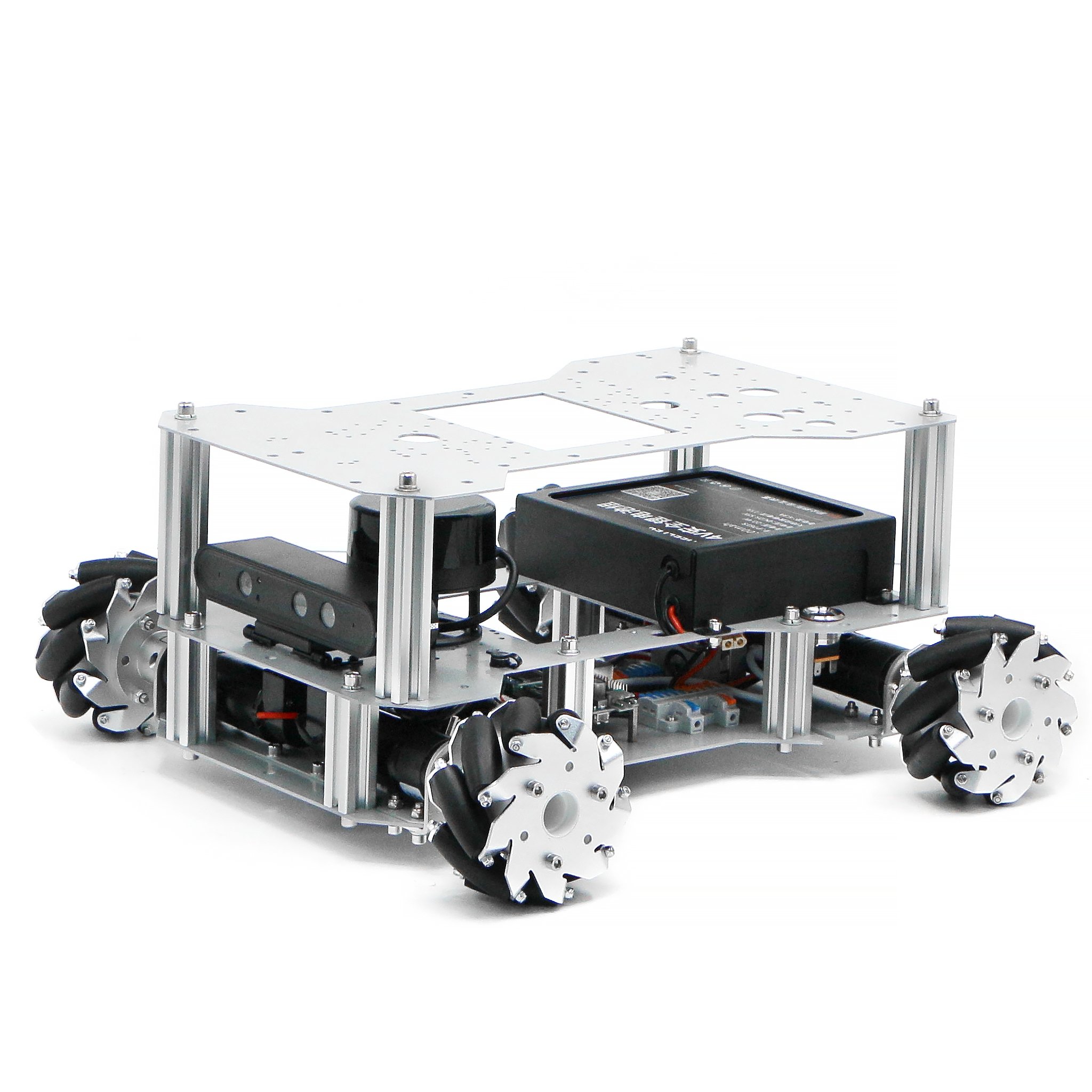
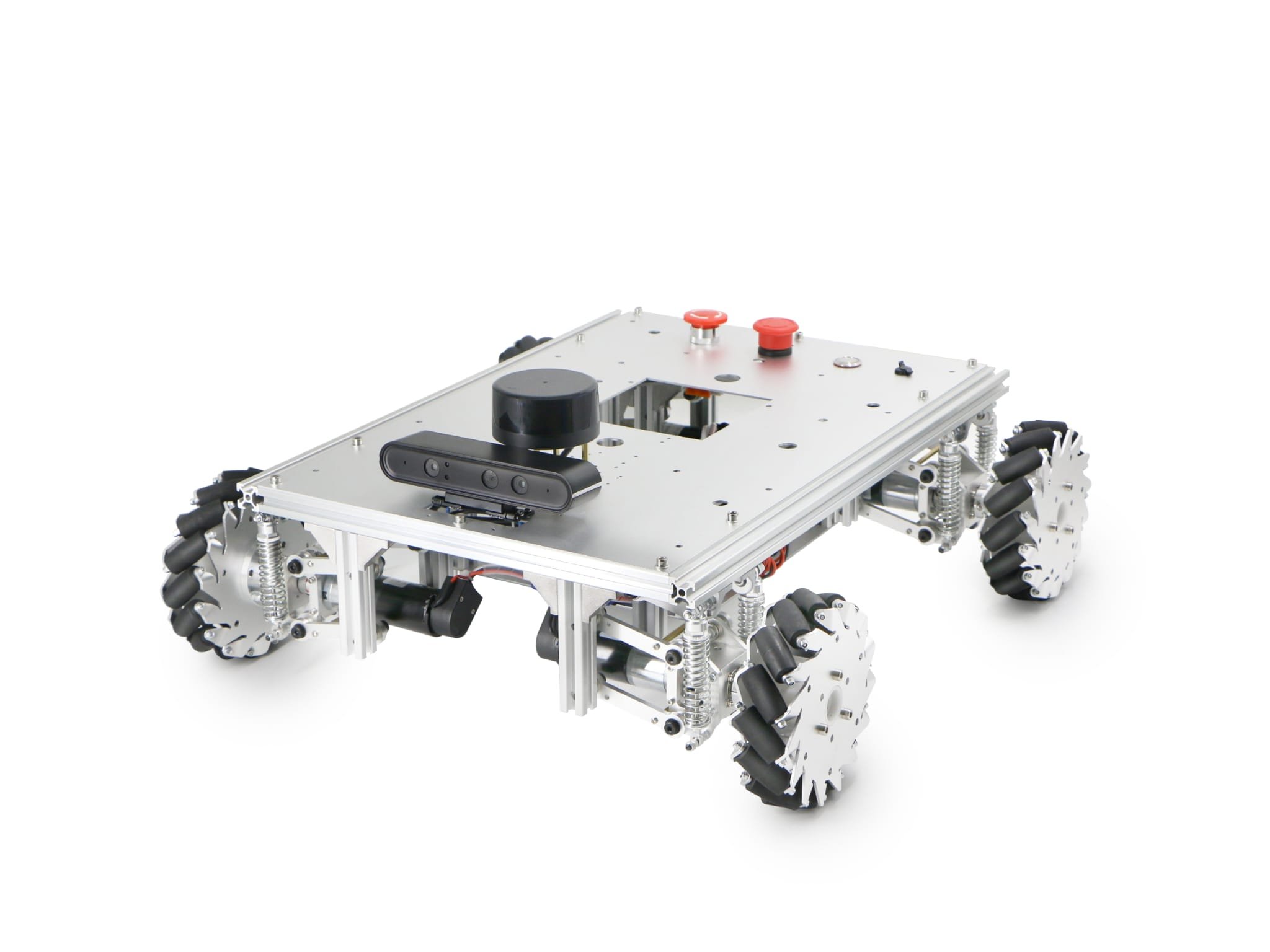
Whichever package you opt for, you will receive Rosbots with identical hardware and software, which includes the worlds leading LiDAR, Leishen M10P LiDAR which operates within a 360° degree field at a range of 30m, plus ROS packages and source codes which facilitate rapid prototyping and development. Also bundled within the package are appropriate obstacle avoidance algorithms and multi-agent formation algorithms.
Naturally, each individual Rosbot is capable of working independently, but when operating in collaboration with other units requires communication with the other units, and this achieved through a local Wifi network, and for you further convenience a Wifi router is also included with each package, allowing you to simply establish a dedicated network just for your Robofleet.
The standard Rosbot is an exceptionally good value robot, but when bought as part of a Robofleet package offers even greater savings, with up to 50% discount on the price of a single unit if you purchase the ultimate package of 15 units.
The Robofleet offers a unique opportunity for education and development in the world of robotics and has been thoughtfully put together to help you meet these objectives with the minimum of fuss and trouble; please feel free to contact us to find out more about Robofleet or any of our other products.